Motivation: Neural Networks
Suppose we have datasets $(z_m,y_m)_{m=1}^N$, where $z_m\in \mathbb{R}^{l_0}$ is the data and $y_m\in \mathbb{R}^{l_L}$ is the corresponding label. The aim of the neural network is to reconstruct the map from all $z_m$ to $y_m$.
Let $\varphi:\mathbb{R}\to\mathbb{R}$ be a nonlinear activation function and $\varphi^l:\mathbb{R}^l\to\mathbb{R}^l$ be pointwise, that is
$$
\varphi^l(z)=(\varphi(z_1),\varphi(z_2),\cdots,\varphi(z_l))\quad \text{for } z=(z_1,z_2,\cdots,z_l).
$$
Then the framework for neural neural network is shown as follows.
 Figure 1: The framework for neural neural network.
Figure 1: The framework for neural neural network.The parameters we need to optimize can be listed as
$$
\Psi=\left((\alpha^1,\beta^1),(\alpha^2,\beta^2),\cdots,(\alpha^L,\beta^L)\right)\in \Pi=\left((\mathbb{R}^{l_1\times l_0}\times \mathbb{R}^{l_1})\times (\mathbb{R}^{l_2\times l_1}\times \mathbb{R}^{l_2})\times \cdots \times (\mathbb{R}^{l_L\times l_{L-1}}\times \mathbb{R}^{l_L})\right).
$$
And the reconstruction map can be defined as
$$
\begin{aligned}
\operatorname{R\Psi}: \mathbb{R}^{l_0}&\to \mathbb{R}^{l_L}\\\
z^0&\mapsto z^L.
\end{aligned}
$$
And the learning task can be formulated as the following optimization problem (often non-convex)
$$
\inf_{\Psi\in\Pi} \int_{\mathbb{R}^{l_0}\times \mathbb{R}^{l_L}} \Phi\Big(y-(\operatorname{R\Psi})(z)\Big)\ \nu(dz,dy),
$$
where $\Phi: \mathbb{R}^{l_L}\to \mathbb{R}$ is a convex function.
Two Layer Neural Networks
Now we focus on the two layer neural networks. Let $l_0=d-1,L=2, l_1=n, l_2=1$ and $\beta^1=\beta^2=0$. We can partition the matrix $\alpha^1\in \mathbb{R}^{n\times (d-1)}$ into blocks
$$
\alpha^1=\begin{pmatrix}
(\alpha_1^1)^T\\\
(\alpha_2^1)^T\\\
\vdots\\\
(\alpha_n^1)^T
\end{pmatrix},\quad \alpha_i^1\in \mathbb{R}^{d-1},\ i=1,2,\cdots,n
$$
and let
$$
\alpha^2=\Big(\frac{c_1}{n},\frac{c_2}{n},\cdots,\frac{c_n}{n}\Big),\quad c_i\in \mathbb{R},\ i=1,2,\cdots,n.
$$
Then for input $z^0\in \mathbb{R}^{d-1}$, we have
$$
z^1=\varphi^n(\alpha^1 z^0)=\begin{pmatrix}
\varphi(\alpha_1^1\cdot z^0)\\\
\varphi(\alpha_2^1\cdot z^0)\\\
\vdots\\\
\varphi(\alpha_n^1\cdot z^0)
\end{pmatrix}
$$
and
$$
z^2=\alpha^2z^1=\frac{1}{n}\sum_{i=1}^n c_i\varphi(\alpha_i^1\cdot z^0),
$$
where “$\cdot$” denotes the inner product. Hence the reconstruction map for two layer neural networks problem is
$$
\begin{aligned}
\operatorname{R\Psi}: \mathbb{R}^{d-1}&\to \mathbb{R}\\\
z&\mapsto \frac{1}{n}\sum_{i=1}^n c_i\varphi(\alpha_i^1\cdot z).
\end{aligned}
$$
Then the learning task can be formulated as the following optimization problem (often non-convex)
$$
\inf_{\alpha_i,\ c_i,\ i=1,2,\cdots,n} \int_{\mathbb{R}^{d}} \Phi\Big(y-\frac{1}{n}\sum_{i=1}^n c_i\varphi(\alpha_i\cdot z)\Big)\ \nu(dz,dy),
$$
where $\Phi: \mathbb{R}\to \mathbb{R}$ is a convex function. To simplify the notations, we denote $x=(\alpha,c)\in \mathbb{R}^{d}$ and
$$
\widehat\varphi (x,z):= c\varphi(\alpha\cdot z).
$$
Then the optimization problem can be written as
$$
\inf_{x^i=(\alpha_i,c_i),\ i=1,2,\cdots,n} F^n(x^1,\cdots,x^n):= \int_{\mathbb{R}^{d}} \Phi\Big(y-\frac{1}{n}\sum_{i=1}^n \widehat\varphi(x^i,z)\Big)\ \nu(dz,dy).\tag{P1}
$$
One of the most important observation is that if we lift the finite-dimensional optimization problem (P1) to the infinite-dimensional optimization problem over the space of probability measures (P2), it will become convex.
$$
\inf_{m\in \mathcal{P}(\mathbb{R}^d)} F(m):=\int_{\mathbb{R}^{d}} \Phi\Big(y-\mathbb{E}_{X\sim m}[\widehat\varphi(X,z)]\Big)\ \nu(dz,dy).\tag{P2}
$$
Proposition 1. The functional $F: \mathcal{P}(\mathbb{R}^d)\to\mathbb{R}$ is convex.
Proof : For all $m,m^\prime\in \mathcal{P}(\mathbb{R}^d)$ and all $t\in [0,1]$,
$$
\begin{aligned}
F((1-t)m+tm^\prime) &=\int_{\mathbb{R}^{d}} \Phi\Big(y-\mathbb E_{X\sim (1-t)m+tm^\prime}[\widehat\varphi(X,z)]\Big)\ \nu(dz,dy)\\\
&=\int_{\mathbb{R}^{d}} \Phi\Big((1-t)(y-\mathbb E_{X\sim m}[\widehat\varphi(X,z)])+t(y-\mathbb E_{X\sim m^\prime}[\widehat\varphi(X,z)])\Big)\ \nu(dz,dy)\\\
&\le (1-t)\int_{\mathbb{R}^{d}} \Phi\Big(y-\mathbb E_{X\sim m}[\widehat\varphi(X,z)]\Big)\ \nu(dz,dy)+t \int_{\mathbb{R}^{d}} \Phi\Big(y-\mathbb E_{X\sim m^\prime}[\widehat\varphi(X,z)]\Big)\ \nu(dz,dy)\\\
&=(1-t)F(m)+tF(m^\prime).
\end{aligned}
$$
Hence $F$ is convex. $\square$
Now maybe you want to ask what is the relationship between (P1) and (P2) ? It is obvious that
$$
F^n(x^1,\cdots,x^n)=F(\frac{1}{n}\sum_{i=1}^n \delta_{x^i}).
$$
Hence we have
$$
\inf_{x^i,\ i=1,2,\cdots,n} F^n(x^1,\cdots,x^n)\ge \inf_{m\in \mathcal{P}(\mathbb{R}^d)} F(m).
$$
Moreover,we have the following theorem, which shows that the infimum of (P1) and (P2) is very close as long as $n$ is sufficiently large.
Theorem 1. We assume that the 2nd order linear functional derivative of $F$ exists, is jointly continuous in both variables and that there is $L>0$ such that for any random variables $\eta_1,\eta_2$ such that $\mathbb{E}[|\eta_i|^2]<\infty$, $i=1,2$, it holds that
$$
\mathbb{E} \left[\sup_{\nu\in\mathcal P_2(\mathbb{R}^d)}\left\vert\frac{\delta F}{\delta m}(\nu,\eta_1)\right\vert\right]
+
\mathbb{E}\left[\sup_{\nu\in\mathcal P_2(\mathbb{R}^d)}\left\vert\frac{\delta^2 F}{\delta m^2}(\nu,\eta_1,\eta_2)\right\vert\right]
\leq L
$$
If there is an $m^\star\in\mathcal P_2(\mathbb{R}^d)$ such that $F(m^\star)=\inf_{m\in\mathcal P_2(\mathbb{R}^d)}F(m)$ then we have that
$$
\left|
\inf_{x^i,\ i=1,2,\cdots,n}
F\left(\frac{1}{n}\sum_{i=1}^n\delta_{x^i}\right)
-
F(m^\star)
\right|
\leq
\frac{2L}{n}.
$$
So the question becomes how to solve (P2)? From now on, we assume the functional $F$ has the following properties.
Assumption 1. Assume that $F \in \mathcal C^1$ is convex and bounded from below, where we say a function $F : \mathcal{P}(\mathbb{R}^d) \to \mathbb{R}$ is in $\mathcal C^1$ if there exists a bounded continuous function
$$
\frac{\delta F}{\delta m} : \mathcal{P}(\mathbb{R}^d) \times \mathbb{R}^d \to \mathbb{R}
$$
such that
$$
F(m’) - F(m) = \int_0^1 \int_{\mathbb{R}^d} \frac{\delta F}{\delta m}\bigl((1-\lambda)m + \lambda m’, x\bigr)\ (m’ - m)(dx)\ d\lambda.
\tag{1}
$$
We will refer to $\frac{\delta F}{\delta m}$ as the linear functional derivative. There is at most one $\frac{\delta F}{\delta m}$, up to a constant shift, satisfying (1). To avoid the ambiguity, we impose
$$
\int_{\mathbb{R}^d} \frac{\delta F}{\delta m}(m,x)\ m(dx)=0.
$$
If $(m,x)\mapsto \frac{\delta F}{\delta m}(m,x)$ is continuously differentiable in $x$, we define its intrinsic derivative $D_m F : \mathcal{P}(\mathbb{R}^d)\times \mathbb{R}^d \to \mathbb{R}^d$ by
$$
D_m F(m,x)=\nabla\left(\frac{\delta F}{\delta m}(m,x)\right).
$$
However, even under the Assumption 1, the existence and uniqueness of the minimizer of the optimization problem (P2) is not clear. So instead, we can consider the regularized problem (P3).
$$
\inf_{m\in \mathcal{P}(\mathbb{R}^d)} V^\sigma(m):=F(m)+\frac{\sigma^2}{2}H(m),\tag{P3}
$$
where
$$
g(x)=e^{-U(x)} \text{ with } U \text{ s.t. } \int_{\mathbb{R}^d} e^{-U(x)}dx=1,
$$
is the density of the Gibbs measure and the function $U$ satisfies the following conditions.
Assumption 2. The function $U:\mathbb{R}^d \to \mathbb{R}$ belongs to $C^\infty$. Further,
(i) there exist constants $C_U>0$ and $C’_U\in\mathbb{R}$ such that
$$
\nabla U(x)\cdot x \ge C_U |x|^2 + C’_U \quad \text{for all } x\in\mathbb{R}^d.
$$
(ii) $\nabla U$ is Lipschitz continuous.
Immediately, we obtain that there exist $0\le C’ \le C$ such that for all $x\in\mathbb{R}^d$
$$
C’|x|^2 - C \le U(x) \le C(1+|x|^2), \qquad |\Delta U(x)| \le C.
$$
For regularized optimization problem (P3), we have a necessary and sufficient first-order optimality condition.
Theorem 2. Under Assumptions 1 and Assumption 2, the function $V^\sigma$ has a unique minimizer absolutely continuous with respect to Lebesgue measure $\ell$, and belonging to $\mathcal{P}_2(\mathbb{R}^d)$. Moreover,
$$
m^* \in \mathcal{P}_2(\mathbb{R}^d) = \underset{m \in \mathcal{P}(\mathbb{R}^d)}{\arg\min}\ V^\sigma(m)
$$
if and only if $m^*$ is equivalent to Lebesgue measure and
$$
\frac{\delta F}{\delta m}(m^\star, \cdot) + \frac{\sigma^2}{2} \log(m^\star) + \frac{\sigma^2}{2} U
\text{ is a constant, } \ell\text{-a.s.},
\tag{2}
$$
where we abuse the notation, still denoting by $m^*$ the density with respect to Lebesgue measure.
What’s more, as shown in my previous blog: An Example of Gamma Convergence, we know that
$$
V^\sigma = F + \frac{\sigma^2}{2} H \xrightarrow{\Gamma} F \quad\text{as } \sigma \downarrow 0.
$$
Therefore, every cluster point of
$$
\left(\arg\min_m V^\sigma(m)\right)_\sigma
$$
is a minimizer of $F$.
By Theorem 2, we know that if $m^\star$ is the unique minimizer of (P3), then
$$
D_m F(m^\star, x) + \frac{\sigma^2}{2} \frac{\nabla m^\star(x)}{m^\star(x)} + \frac{\sigma^2}{2} \nabla U(x)
=0\quad \ell\text{-a.s.},
\tag{3}
$$
which means $m^\star$ is the invariant measure of the following Fokker-Planck equation
$$
\partial_t m_t=\nabla\cdot \left[\left(D_m F(m_t, x)+\frac{\sigma^2}{2} \nabla U(x)\right)m_t\right]+\frac{\sigma^2}{2} \Delta m_t.\tag{4}
$$
Therefore, $m^\star$ is also the invariant measure of the following mean-field Langevin dynamic
$$
dX_t = -\left(D_m F(m_t,X_t) + \frac{\sigma^2}{2}\nabla U(X_t)\right)dt + \sigma dW_t,
\qquad \text{where } m_t := \mathrm{Law}(X_t).
\tag{5}
$$
However, the dynamic (5) is hard to discretization. Consider independent random variables $X_0^i$, $X_0^i\sim m_0$ and independent Brownian motions $(W^i),\ i=,1,2\cdots,n$. By approximating the law of the process (5) its empirical law we arrive at the following interacting particle system
$$
\begin{cases}
dX_t^i=-\left(D_mF(m_t^n,X_t^i)+\frac{\sigma^2}{2}\nabla U(X_t^i)\right)dt+\sigma dW_t^i,\quad i=1,\ldots,n,\\\
m_t^n=\dfrac{1}{n} \sum\limits_{i=1}^n\delta_{X_t^i}.
\end{cases}
\tag{6}
$$
By the theory of mean-field limit, we know as $n\to\infty$, the dynamic (6) will tend to dynamic (5). By the following lemma, the term $D_mF(m_t^n,X_t^i)$ is easy to compute.
Lemma 1. We have
$$
\partial_{x^i} F^n(x^1,\cdots,x^n) = \frac{1}{n}D_mF(\sum_{i=1}^n \delta_{x^i},x^i).
$$
Hence by Lemma 1, the dynamic (6) can be written as
$$
dX_t^i = -\left( n \partial_{x_i} F^n(X_t^1,\cdots,X_t^n) + \frac{\sigma^2}{2} \nabla U(X_t^i) \right) dt + \sigma dW_t^i .\quad i=1,2,\cdots,n.
$$
By the definition of $F^n$ in (P1), we have
$$
\partial_{x^i} F^n(x^1,\cdots,x^n)
=
-\frac{1}{n}
\int_{\mathbb{R}^d}
\dot{\Phi}!\left(
y-\frac{1}{n}\sum_{j=1}^n \hat{\varphi}(x^j,z)
\right)
\nabla \hat{\varphi}(x^i,z)\ \nu(dz,dy).
$$
We thus see that the dynamic (6) corresponds to
$$
dX_t^i
=
\left(
\int_{\mathbb{R}^d}
\Phi^\prime\left(
y-\frac{1}{n}\sum_{j=1}^n \hat{\varphi}(X_t^j,z)
\right)
\nabla \hat{\varphi}(X_t^i,z)\ \nu(dz,dy)
-
\frac{\sigma^2}{2}\nabla U(X_t^i)
\right)dt
+\sigma dW_t^i ,\quad i=1,2,\cdots,n.
$$
For a fixed time step $\tau > 0$ fixing a grid of time points $t_k = k\tau$, $k = 0,1,\ldots$ we can then write the explicit Euler scheme
$$
X_{t_{k+1}}^{\tau,i} - X_{t_k}^{\tau,i}
=
\left(
\int_{\mathbb{R}^d}
\Phi^\prime \left(
y - \frac{1}{n}\sum_{j=1}^n \hat{\varphi}(X_{t_k}^{\tau,j},z)
\right)
\nabla \hat{\varphi}(X_{t_k}^{\tau,i},z)\ \nu(dz,dy)
-
\frac{\sigma^2}{2}\nabla U(X_{t_k}^{\tau,i})
\right)\tau
+
\sigma\bigl(W_{t_{k+1}}^i - W_{t_k}^i\bigr).
$$
To relate this to the gradient descent algorithm we consider the case where we are given data points $(y_m,z_m),\ m=1,2,\cdots,N$ which are i.i.d. samples from $\nu$. If the loss function $\Phi(x)=x^2$ is simply the square loss then the evolution of parameter $x_k^i$ will simply read as
$$
x_{k+1}^i
=
x_k^i
+
2\tau
\left(
\left(
y_{I_k} - \frac{1}{n}\sum_{j=1}^n \hat{\varphi}(x_k^j,z_{I_k})
\right)
\nabla \hat{\varphi}(x_k^i,z_{I_k})
-
\frac{\sigma^2}{2}\nabla U(x_k^i)
\right)
+
\sigma\sqrt{\tau}\ \xi_k^i,
$$
with$I_k\sim \mathrm{Unif}\{1,2,\cdots,N\}$ and $\xi_k^i$ independent samples from $N(0,I_d)$, which can be viewed as a version of regularized noisy SGD algorithm.
Summary
The main analytical framework of this theory can be illustrated by the following diagram.
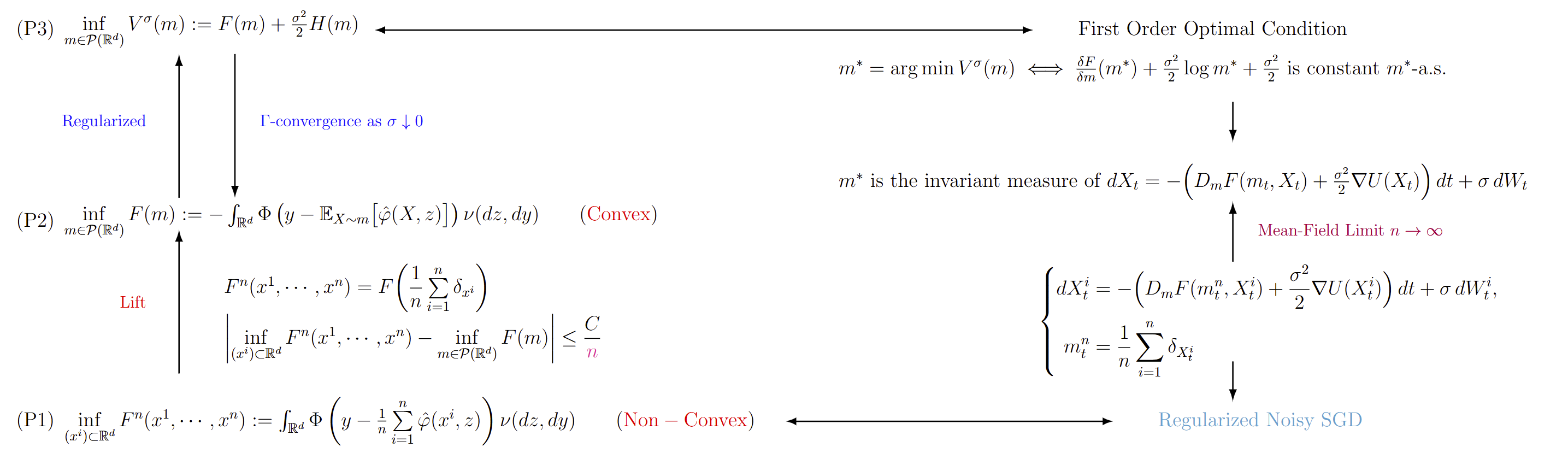 Figure 2: Summary of the main analytical framework.
Figure 2: Summary of the main analytical framework.Reference
Hu, Kaitong, et al. “Mean-field Langevin dynamics and energy landscape of neural networks.” Annales de l’Institut Henri Poincare (B) Probabilites et statistiques. Vol. 57. No. 4. Institut Henri Poincaré, 2021.
]]>The cover image of this article was taken at Jungfrau in Switzerland.